Fig. 1
tram e trasporto pubblico a Roma
Note di trazione elettrica
Frenatura a recupero in trazione tramviaria
Frenatura a recupero di energia
Motori con eccitazione in derivazione
Motori
con eccitazione compound
Motori con eccitazione in serie
Nelle seguenti considerazioni trattiamo del problema essenzialmente da un punto di vista storico-tecnico, nelle realizzazioni con mezzi elettromeccanici, perchè, come al solito, l'avvento dell'elettronica di potenza e il parziale abbandono del motore a c.c. hanno portato a soluzioni completamente diverse.
Cenno storico
Scoperto, ai primordi della trazione elettrica, che il motore elettrico, oltre che trainare, poteva anche frenare, si pensò subito ad una possibile utilizzazione dell'energia ricavabile dalle vetture in rallentamento o nelle discese, che non fosse quella di riscaldare inutilmente dei banchi di resistenze. Due erano le vie che si presentavano per arrivare allo scopo: la ricarica delle batterie di accumulatori che allora si volevano utilizzare per la propulsione dei rotabili e il rinvio di energia sulla rete di alimentazione, utilizzabile dagli altri rotabili in servizio. Lasciando da parte la prima via, peraltro scarsamente seguita anche per la rapida scomparsa della trazione ad accumulatori, vedremo che la seconda, pur fra innumerevoli e spesso irrisolte difficoltà, arriverà ad un parziale successo. In America, dopo un iniziale interesse alla faccenda, si lasciò cadere tutto, anche la semplice frenatura reostatica, mirando di più, come è sempre stato nel carattere degli americani, alla semplicità e alla robustezza delle cose che non ai sofisticati tecnicismi; in Europa, invece, si delinearono verso il 1929 due scuole di pensiero: quella austro-ungarica-tedesca rappresentata dall'ing. Töfflinger della Siemens-Schuckert che propugnava l'impiego dell'ordinario motore in serie con opportune varianti ai circuiti di avviamento e regolazione e quella francese, capeggiata dall'ing. Bacqueyrisse, direttore tecnico dell'azienda tramviaria di Parigi. Mentre il Töfflinger e i tecnici tedeschi riuscivano a mettere a punto un sistema relativamente semplice anche se raggiungente solo in parte gli scopi prefissati, sistema poi abbastanza utilizzato per es. sulle reti tedesche e ungheresi, il Bacqueyrisse si impantanava in una serie infinita di studi e complicate modifiche ai rotabili esistenti con l'impiego del motore ad eccitazione compound, che non riuscirono ad arrivare a soluzioni di carattere generale, anche perchè nel 1930 fu decisa la soppressione della grande rete tramviaria parigina, soppressione che, avviata nel 1934 si concluderà nel 1938, ciò che pose termine a prove ed esperimenti di qualsiasi genere. In Italia, un tipo di freno a recupero preso in considerazione è stato quello detto a divisori di tensione (o a variazione della tensione di indotto), sistema Somaini, utilizzante una speciale macchina ruotante per l'alimentazione di campi e indotti dei motori di trazione; a causa del peso e dell'ingombro del macchinario questo sistema è stato sempre ritenuto adatto solo alla trazione ferroviaria, per quanto anche in campo tramviario ne sia stata tentata qualche applicazione sperimentale, sulle reti di Milano, Bologna, Genova e Roma; in quest'ultima, nel 1929 le prime due motrici a carrelli furono modificate e poste in servizio sulla linea di Monte Mario caratterizzata da lunghe tratte in pendenza, ma alla fine i contatori montati sulle vetture mostrarono che il risparmio ottenuto col sistema era irrisorio, mentre notevoli risultavano il peso aggiunto e la manovra della vettura e di recupero non si parlò più. Viceversa, l'utilizzazione del motore compound fu utilizzata, verso il 1935, nella trazione filoviaria in Inghilterra: a Roma entrarono in servizio, nel 1936, due gruppi di rotabili a due assi con equipaggiamento Breda, per un totale di 22 filobus, oltre ad una vettura a tre assi con equipaggiamento TIBB; entrambe le soluzioni si dimostrarono in esercizio poco affidabili e gli esperimenti non ebbero seguito.
Frenatura a recupero di energia
Fig. 1
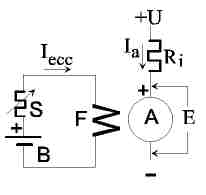
Lo schema di fig. 1 rappresenta un motore a c.c. con eccitazione indipendente, ossia l'avvolgimento di campo F è alimentato, indipendentemente dall'indotto, da una sorgente esterna, ad es. una batteria B, attraverso un reostato S; supponiamo per ora che la corrente di eccitazione in F sia mantenuta costante. Collegando l'indotto ad una sorgente di alimentazione, indicata con +U, lo stesso di pone in rotazione e la sua velocità aumenta fino a che la coppia resistente eguaglia la coppia motrice, mantenendosi poi costante. L'indotto, nella rotazione entro il campo prodotto da F, diviene sede di una forza elettro motrice che, per le leggi dell'induzione, sarà tale da opporsi alla causa che la ha generata, ossia sarà di segno opposto alla U ed è pertanto nota come forza contro elettromotrice o f.c.e.m., crescente con la velocità. Applicando la legge di Ohm al circuito dell'indotto e indicando con Ri la resistenza del circuito, comprensiva della resistenza interna dell'indotto e del circuito di alimentazione e con U ed E risp. la tensione di alimentazione e la f.c.e.m., l'indotto sarà percorso dalla corrente Ia=(U-E)/Ri. A indotto fermo è E=0 e Ia=U/Ri è la corrente massima assorbita dall'indotto, mentre aumentando la velocità la stessa diminuisce in base alla relazione precedente ed arriverebbe a zero alla velocità per la quale è E=U, condizione irrealizzabile in pratica perchè corrisponderebbe a corrente nulla, ossia a coppia motrice nulla; con il motore a regime, a velocità costante, la Ia raggiunge un valore minimo per fornire la coppia motrice necessaria a vincere le resistenze passive.
Supponiamo ora che, partendo da quest'ultima condizione, un motore esterno aumenti gradatamente la velocità dell'indotto, col che E crescerà dapprima fino ad E=U e Ia=0 e successivamente a valori maggiori di U, E>U cioè U-E<0; la corrente nell'indotto diverrà (U-E)/Ri<0, ossia si invertirà di senso rispetto alla condizione precedente e il motore diverrà un generatore rinviando corrente al circuito di alimentazione. E' questo il principio del recupero di energia, applicato, nel caso dei rotabili a trazione elettrica, essenzialmente alla frenatura.
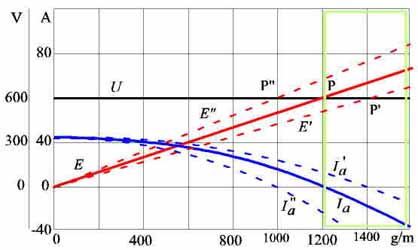
Fig. 2
Nel diagramma di fig. 2 il tratto in nero rappresenta la tensione di alimentazione U=600 V, costante; per un dato valore della corrente di eccitazione Iecc, la retta in rosso a tratto pieno è la f.c.e.m. E, che partendo da zero aumenta con la velocità dell'indotto, mentre la curva a tratto pieno in bleu è la corrente Ia assorbita dall'indotto che, partendo dal valore di avviamento di circa 40 A, si riduce progressivamente. A 1200 g/m si ha E=U e pertanto la Ia si annulla (punto P) e se l'indotto è trascinato da una coppia motrice esterna ad una velocità superiore, la E supera U e la Ia riprende a crescere nel senso opposto; a 1600 g/m si ha E=750 V circa e Ia=-40 A. La fase di recupero è quindi quella contrassegnata in verde, nella quale il motore, funzionando da generatore, oppone una coppia resistente all'azione esterna che lo sollecita ad aumentare la velocità. Qualora fossimo partiti con una corrente di eccitazione minore, la f.c.e.m. sarebbe stata minore, la corrente Ia maggiore e l'equilibrio E=U si sarebbe avuto al punto P', con 1400 g/m e recupero fino Ia'=25 A circa; l'inverso per un aumento dell'eccitazione, equilibrio a 1000 g/m con Ia"=35 A circa. La variazione dell'eccitazione del motore è quindi un mezzo per determinare la velocità del motore alla quale deve iniziare il recupero.
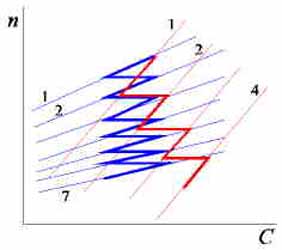
Fig. 3
I dati nell'esempio di cui sopra sono stati esagerati per avere un diagramma comprensibile; una tensione di più di 900 V per una linea a 600 V, come si avrebbe nel caso di aumento dell'eccitazione a 1600 g/m, non sarebbe certo ammissibile.
In fig. 3 è dato l'andamento della velocità della vettura espressa in numero di giri nell'unità di tempo del motore in funzione della coppia frenante, per due motori con diverse caratteristiche n, C e intensità di campo crescenti dalla curva 1 in poi; si vede che tanto più inclinata sull'orizzontale è la caratteristica, tanto minore è il numero di posizioni di controller necessarie per ottenere una data variazione di velocità.
Accanto all'effetto utile, il risparmio di energia sul quale peraltro si è spesso esagerato, la frenatura a recupero presenta alcuni aspetti negativi, quali l'impossibilità di portare la vettura all'arresto, caratteristica in comune con il freno reostatico e la stretta dipendenza dello sforzo frenante dalle condizioni elettriche momentanee della rete di alimentazione che non è detto sia sempre in grado di assorbire l'energia recuperata.
Consideriamo il caso di un'unica motrice tramviaria in servizio sulla linea. Se l'alimentazione alla linea è data da una batteria di accumulatori, magari in tampone su una dinamo, il recupero è certamente possibile, portando alla carica della batteria; le cose potrebbero ancora funzionare se al posto della batteria vi fosse una sola dinamo, che in recupero funzionerebbe da motore, anche se la cosa non sarebbe semplice in quanto il motore primo che aziona la dinamo difficilmente ammetterebbe di essere a sua volta condotto; se però la centrale alimenta la linea con un generatore di c.a. e raddrizzatori, il recupero sarebbe ovviamente impossibile. All'atto pratico le cose, da questo punto di vista, dipendono molto dalle dimensioni e dalla configurazione della rete di alimentazione; se in una rete sufficientemente estesa vi è sempre un certo numero di motrici in trazione in grado di utilizzare l'energia recuperata dalle altre, in reti di dimensioni ridotte o su linee isolate non sarebbe possibile alcun recupero.
Ma v'è di più: qualsiasi interruzione del circuito di alimentazione della vettura non solo interrompe completamente e istantaneamente la frenatura, ma può dar luogo sovratensioni come minimo in grado di compromettere alcune parti dell'equipaggiamento elettrico e danneggiare seriamente il collettore dei motori; le cause di possibile interruzione dell'alimentazione sono numerose, dal semplice passaggio sotto isolatori di sezione, allo scarrucolamento del trolley, all'intervento di protezioni sulla vettura (interruttori a massima corrente, fusibili), a guasti sulla rete, ecc.
Di conseguenza, il freno a recupero deve sempre essere affiancato da un freno in grado di portare la vettura all'arresto in spazi di frenatura convenienti e sempre disponibile e qui si apre un altro divario fra le varie scuole di pensiero. Mentre in alcune nazioni, quali l'Italia, la Francia, l'Inghilterra e, almeno fino alla fine degli anni Venti, anche l'Ungheria, trascorso un primo periodo pionieristico, il tram è stato dotato di un freno di servizio ad aria compressa, Westinghouse o simili, nelle nazioni di lingua tedesca o affini quali Austria, Germania, Polonia, Cecoslovacchia la tendenza è stata sempre di affidarsi esclusivamente al freno reostatico, tutt' altro che adatto al caso in questione, integrato dall'usuale freno a mano e, quasi sempre da un freno elettromagnetico a pattini spesso insufficiente perchè alimentato dalla corrente reostatica o, peggio ancora, dalla linea.
* * *
Si distinguono comunemente due tipi di frenatura a recupero, anche se all'atto pratico non differiscono sostanzialmente l'uno dall'altro:
I due sistemi possono naturalmente coesistere, ma, mentre il recupero di tenuta non è molto difficile a realizzarsi, il pieno recupero, almeno sui motori a c.c. e con l'impiego di apparecchiature esclusivamente elettromeccaniche, porta spesso complicazioni, ingombro e peso inaccettabili su rotabili non appositamente previsti. Nel seguito vediamo alcune applicazioni dei principi sopra esposti per i vari tipi di eccitazione dei motori di trazione.
Motori con eccitazione in derivazione
Il motore in derivazione, se alimentato a tensione costante, ha caratteristiche identiche al motore ad eccitazione indipendente. E' stato scarsamente impiegato in trazione tramviaria per la coppia motrice non elevata a motore fermo. Ricordiamo che nel motore in derivazione non si devono invertire le connessioni del campo o dell'indotto per passare da trazione a frenatura, perchè invertendosi la f.c.e.m. si inverte la corrente nell'indotto, ma non nell'induttore (fig. 4).
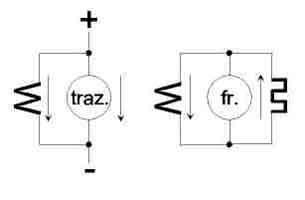
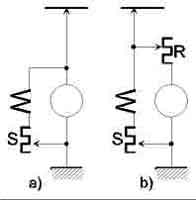
Figg. 4, 5
La regolazione della velocità su un rotabile con motore in derivazione si esegue, nel modo più semplice, variando la corrente di eccitazione nell'avvolgimento di campo con il reostato S, naturalmente dopo qualche posizione reostatica R non potendosi certo collegare l'indotto, da fermo, direttamente alla linea di alimentazione (fig. 5).
Il funzionamento in recupero con il motore in derivazione è teoricamente semplice e segue da quanto chiarito al punto precedente. Ci mettiamo in un caso pratico, considerando una linea costituita da una tratto in orizzontale seguita da una lunga tratta in discesa: è il caso di molte linee a dentiera, le uniche, in pratica, nelle quali il motore in derivazione sia stato impiegato; il controller del rotabile sia dotato di due posizioni di avviamento reostatico e di quattro di riduzione di eccitazione (fig. 6).
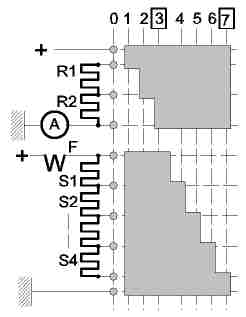
Fig. 6
Avviato il rotabile ed escluso tutto il reostato di avviamento, pos. 3, il conducente aumenta la velocità riducendo gradatamente l'eccitazione del motore fino alla posizione di massima riduzione di campo, pos. 7, alla quale corrisponde la massima velocità in orizzontale. Impegnata la discesa, fermo restando il controller in pos. 7, la vettura aumenterà la velocità fino al valore per cui la f.c.e.m. eguaglia la tensione di linea, situazione nella quale il motore non assorbe corrente; ogni ulteriore aumento della velocità porterà ad un aumento della f.c.e.m. in senso opposto, che si sommerà alla tensione di linea e la corrente nell'indotto sarà di senso inverso a quella di marcia, attuandosi il recupero e la frenatura del rotabile, fino ad un punto di equilibrio nel quale la coppia frenante eguaglierà la coppia motrice fornita dalla gravità. Il conducente potrà ulteriormente ridurre la velocità, retrocedendo col controller sulle posizioni di aumento dell'eccitazione, pos. da 6 a 3; potrà anche affrontare la discesa con eccitazione diversa dalla minima, per ridurre la velocità iniziale della vettura, mentre la stessa procedura sarà utilizzabile per ottenere il rallentamento del rotabile in qualsiasi condizione, non solo in una discesa, naturalmente da integrare con un freno meccanico se si vuole il completo arresto del rotabile.
Durante la frenatura a recupero, la corrente rinviata in linea è data da (E-U)/Ri, con E f.c.e.m. generata dal motore, tensione di linea, ed Ri resistenza del circuito e la vettura marcia con un certo grado di frenatura; ma se ad un certo istante la tensione di linea si abbassa, cosa comunissima dovuta al carico variabile sulla linea, il campo si riduce insieme ad U, E-U aumenta e la corrente I aumenta anch'essa; lo sforzo frenante aumenta anch'esso e la velocità della vettura si riduce e si riduce anche e; il contrario accade per un aumento della tensione di linea. La marcia della vettura è quindi stabile e ciò è una notevole proprietà dell'eccitazione in derivazione.
Il recupero col motore in derivazione presenta quindi ottime caratteristiche e si ottiene in modo abbastanza semplice, anche se all'atto pratico le cose si complicano per i seguenti motivi.
Possiamo quindi dire che con il motore ad eccitazione in derivazione è relativamente semplice la frenatura a recupero, ma è complicata la regolazione della velocità in marcia; due aspetti difficilmente conciliabili tra loro.
Motori con eccitazione compound
Gli inconvenienti del motore in derivazione possono essere, se non del tutto eliminati, almeno attenuati passando all'impiego di motori ad eccitazione compound (detti anche ad eccitazione composta, ma il termine inglese è oramai entrato nell'uso generale), caratterizzati dall'avere due avvolgimenti di campo, l'uno in serie, campo serie Cs, e l'altro in derivazione, campo derivato Cd. Sono utilizzabili i due schemi di fig. 7, che vanno risp. sotto il nome di shunt breve e shunt lungo, praticamente equivalenti nell'impiego; nel primo la bobina del campo serie è attraversata anche dalla corrente che alimenta il campo derivato, normalmente di intensità trascurabile rispetto alla prima. Salvo intervenire spostando le connessioni, i due campi hanno azione opposta in trazione e in frenatura; cioè se sono concomitanti in trazione, risultano in opposizione in frenatura e viceversa; ciò si vede facilmente dal percorso della corrente nei due casi (fig. 8).
Negli schemi i due avvolgimenti di campo sono indicati con simboli diversi, che corrispondono ad una diversa costruzione: il campo serie è composto di poche spire di conduttore di grossa sezione, spesso bandella di rame, essendo attraversato praticamente da tutta la corrente di trazione o frenatura ed ha una resistenza di qualche frazione di ohm; il campo derivato è composto da numerose spire di filo di sezione ridotta, essendo percorso da una corrente derivata dall'alimentazione che è conveniente tenere la più bassa possibile, compatibilmente con l'intensità di campo richiesta ed ha una resistenza di qualche centinaio di ohm.
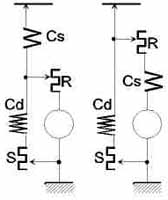
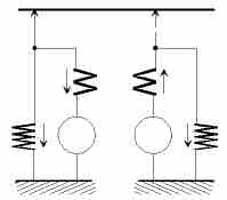
Figg. 7, 8
Se in un motore ad eccitazione compound si apre il circuito del campo derivato, il motore diviene ad eccitazione in serie; viceversa, cortocircuitandone il campo serie, il motore resta con eccitazione in derivazione e dosando opportunamente le amperspire dei due campi, si possono ottenere tutte le gradazioni di funzionamento intermedie tra la serie e la derivazione. La presenza dei campi serie rende poi possibile il funzionamento in parallelo dei due motori in recupero, che abbiamo già visto rischioso se non impossibile con i motori in derivazione; infine, la caratteristica coppia-veloxcità del motore compound si presenta mano piatta di quella del motore in derivazione, consentendo un controller con minor numero di posizioni.
Supponiamo per il momento che nei due motori il campo derivato prevalga su quello serie e il motore 1 si trovi a ruotare a velocità maggiore del 2 avendo le ruote di diametro minore; la tensione generata da 1 sarà maggiore di quella generata da 2, nel quale di conseguenza si invertirà la corrente e, rimanendo il campo dello stesso senso, 2 sarà sollecitato a funzionare da motore in senso inverso con le note conseguenze; ciò non succederebbe se fosse preponderante il campo serie, visto che la macchina in serie è insensibile alla polarità di alimentazione. Da ciò l'importanza di dosare in modo ben definito la proporzione tra campo serie e campo derivato.
In trazione, visto che la migliore modalità di eccitazione è in questo caso la serie, sarà conveniente ridurre la corrente nelle bobine di campo derivato, inserendo, fissa, una parte del reostato di campo S; non conviene escludere del tutto il campo in derivazione, giacchè un campo intenso permette di ottenere una coppia motrice elevata e di conseguenza di ridurre il tempo di avviamento reostatico.
In frenatura a recupero le cose si complicano, per i seguenti motivi.
Questi, insieme a molti altri, furono i problemi che il Bacqueyrisse, strenuo sostenitore del motore compound in recupero, dovette affrontare e che lo portarono, ad un certo punto, a sostenere una soluzione non del tutto conveniente: abbandonare la transizione serie-parallelo e collegare i due motori della vettura permanentemente in serie; successivamente però riconobbe la debolezza della sua idea e, complicando enormemente controller, motori e altro, reintrodusse il serie-parallelo, col che guardando gli schemi di certe motrici di Parigi c'è da mettersi le mani nei capelli.
Condotta della motrice. La condotta della vettura con motori compound viene ad essere alquanto diversa da quella usuale con i motori in serie. Se la motrice prevede la sola marcia con i motori in serie, il controller dispone di qualche posizione di marcia reostatica, seguita dalla posizione di marcia economica, tutte con la massima eccitazione prevista; le successive posizioni sono di riduzione di eccitazione, sulle quali il conducente passerà aumentando gradatamente la velocità della vettura; potrà giungere all'ultima posizione corrispondente alla velocità massima, come potrà fermarsi in qualsiasi posizione intermedia. Da qualsiasi posizione di campo ridotto, lo spostamento a ritroso della manovella del controller avvia la frenatura con recupero, tanto intensa quanto più la manovella si avvicinerà alla posizione di marcia economica, nella quale si ha la massima azione frenante. Normalmente, il conducente resterà sull'ultima posizione di riduzione di eccitazione fino ad una certa distanza dalla prossima fermata; riportando poi indietro il controller sulle precedenti posizioni utilizzerà la frenatura a recupero, frenando alla fine con altro freno per arrestare completamente la vettura. In questa manovra viene quindi a mancare la fase di coasting precedente ad una fermata. E' anche possibile un rallentamento, sempre ottenibile riportando il controller indietro di qualche tacca, per esempio nel caso che la vettura debba arrestarsi in una salita, accodandosi al altre vettura ferma o percorrere una lunga discesa a velocità costante, fermandosi sulla tacca opportuna. In sostanza, mentre con una motrice dotata solo dell'avviamento reostatico con transizione serie-parallelo il conducente ha a disposizione due sole velocità economiche, qui ne ha una serie, corrispondenti alle posizioni del controller seguenti l'ultima con reostato di avviamento escluso. Se la motrice prevede la transizione serie-parallelo, le relative posizioni saranno disposte nel modo usuale, prima della riduzione di eccitazione.
In molte reti le motrici sono anche dotate di frenatura reostatica e di freni a pattini elettromagnetici, che si comandano spostando la manovella del controller, a partire dalla posizione neutra, in senso opposto a quello di marcia.
Alcune applicazioni del motore compound
Rete di Norimberga. La frenatura a recupero è stata utilizzata su questa rete fin dal 1925, utilizzando motori compound connessi permanentemente in serie; durante l'avviamento reostatico su tre posizioni del controller e nella marcia economica (fig. 9, a) il campo derivato è escluso, mentre è inserito in controflusso in una successiva e ultima posizione (fig. 9, b), che risulta quindi a campo ridotto. Per la frenatura, la manovella del controller si sposta dalla parte opposta della posizione neutra, dove trova tre posizioni di freno a recupero, durante le quali i campi serie sono collegati in parallelo tra loro per attenuarne l'azione (fig. 9, c) e quattro successive di freno reostatico con gli indotti in parallelo e alimentazione anche dei freni a pattini elettromagnetici (fig. 9, d). Nel circuito si trovano due contattori: il k1 che apre in caso di sovratensione, per es. in caso di scarrucolamento del trolley, per proteggere i circuiti ausiliari alimentati dalla linea (luce, ecc.); il k2 che chiude nel riporto a zero della manovella del controller dopo la frenatura reostatica, per poter passare sulle posizioni di recupero senza che i motori siano nuovamente alimentati.
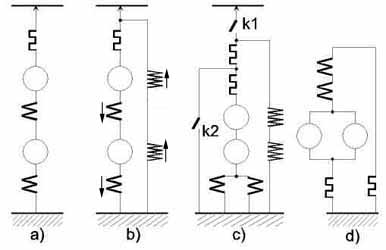
Fig. 9
Rete di Marsiglia. L'equipaggiamento delle motrici comprende due motori compound collegati in serie per cinque posizioni di marcia (fig. 10, a) e in parallelo per successive otto (fig. 10, b); i campi derivati, in parallelo tra loro, sono inseriti e alimentati attraverso una resistenza che viene ridotta nelle successive posizioni di marcia e del tutto esclusa nell'ultima posizione; ogni posizione di marcia, ad esclusione della prima, della sesta e della settima nelle quali sono inserite la resistenza di avviamento e quella per la transizione, è di marcia economica. Ogni spostamento a ritroso della manovella del controller dà luogo al recupero fino alla seconda posizione, dopo la quale un contattore stacca i motori dalla linea e li chiude su una resistenza per avere l'arresto definitivo (fig. 10, c).
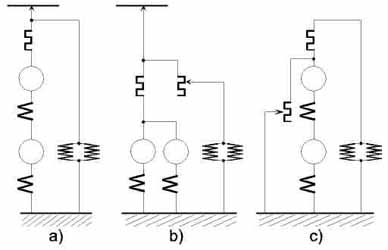
Fig. 10
Rete di Parigi. Nel 1929 il Bacqueyrisse introdusse i motori ad eccitazione compound, modificando una piccola serie di motrici a due assi; lo scopo era doppio: aumentare la velocità commerciale delle vetture e rendere possibile il recupero di energia.
In questo primo esperimento i due motori compound erano permanentemente collegati in serie ed il controller disponeva di dieci posizioni, delle quali le prime tre di avviamento reostatico e le successive sette di riduzione dell'eccitazione dei campi derivati (fig. 11, a); a partire dalla quinta posizione i campi serie erano shuntati da una resistenza (fig. 11, b). La frenatura a recupero si otteneva con lo spostamento a ritroso della manovella del controller a partire dall'ultima posizione. Procedendo al di là della posizione neutra si incontravano due posizioni di frenatura reostatica con i campi alimentati dalla rete (fig. 11, c) ed era infine possibile una frenatura di emergenza con i motori in corto circuito, azionando la maniglia dell'invertitore di marcia su una apposita tacca (fig. 11, d). Un relè di sovratensione tarato a 675 V proteggeva l'equipaggiamento in caso di scarrucolamento del trolley o di mancanza di tensione in linea.
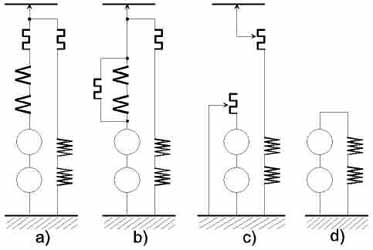
Fig. 11
I vecchi motori mal si prestavano però al servizio richiesto: per avere una sufficiente velocità occorreva ridurre molto il campo con conseguente eccessivo assorbimento di corrente e surriscaldamento degli indotti. Si provvide quindi a riavvolgere gli indotti con filo a sezione quadra anzichè circolare, con risultato pressocchè nullo, anche introducendo una ventilazione forzata. Nonostante una modifica dei controller mirante ad avere un forte campo serie in accelerazione, riducendolo poi in recupero, le vetture modificate si riveleranno più lente di quelle con gli equipaggiamenti di origine.
Si cercò quindi di reintrodurre la transizione serie-parallelo, ma le complicazioni nei controller divennero tali da far rinunciare a questa via. Una ulteriore soluzione fu quella di mantenere la transizione, limitando l'eccitazione compound alle posizioni serie e mantenendo il solo campo serie in parallelo; alla fine si ebbe in rete una decina di tipi di vetture modificate, ma l'energia recuperata, ottimisticamente stimata dal 20 al 25%, si rivelerà solo del 6-8%. In realtà tutti questi esperimenti soffrirono di un difetto di origine: il voler utilizzare dei vecchi motori, che mal sopportavano le modifiche introdotte.
Filobus ATAG del 1936. Per queste vetture sono stati seguiti i criteri generali per l'utilizzazione dei motori compound, ossia:
Il campo serie è sempre inserito.
Motori con eccitazione in serie
Eccitazione ad alimentazione indipendente
Mentre nei motori con eccitazione in derivazione o compound è possibile, anche se con qualche difficoltà nel caso dei questi ultimi, avere una eccitazione costante o quasi, la cosa appare problematica se l'eccitazione è in serie, dal momento che in questo caso la corrente nelle bobine di campo è la stessa che percorre l'indotto. La prima disposizione impiegata per raggiungere lo scopo è stata quella, che in verità appare alquanto ingenua, di togliere le bobine di campo dal circuito degli indotti e di alimentarle da una sorgente esterna, a tensione costante e, volendo evitare l'impiego di accumulatori, derivando la corrente dalla linea di alimentazione attraverso una resistenza di caduta: un'idea assurda, visto che data la ridottissima resistenza delle bobine di campo in serie la dissipazione sulla resistenza risulta enorme.
Lo schema sarebbe quello di fig. 12, a. Una bobina di campo di un motore di trazione da 35 CV, per es. il tipo GE54, ha una resistenza pari ad una frazione di ohm e supponendo le bobine dei due motori in serie tra loro si potrebbe arrivare ad una massimo di 1,5 ohm, diciamo anche 2 ohm, che dovrebbero essere attraversati da una corrente dell'ordine di grandezza della corrente di trazione a motori in serie, che potremo supporre pari a 30 A; la tensione che si localizzerebbe sulle bobine sarebbe di 30.2=60 V e per arrivare alla tensione di linea, ad es. 500 V, 440 V dovrebbero cadere sulla resistenza R che sarebbe quindi di 440/30=15 ohm circa e dissiperebbe 4402/15=13.000 W=13 kW, valore improponibile, anche perchè buona parte dell'energia recuperata in frenatura sarebbe dissipata sulla resistenza.
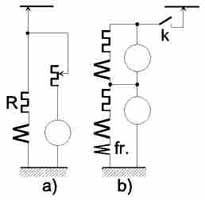
Fig. 12
Rete di Chemnitz. Nonostante gli evidenti inconvenienti, questa disposizione fu utilizzata sulla rete di Chemnitz, in Germania, secondo lo schema indicato nella fig. 12, b; le resistenze di caduta sono le stesse utilizzate in avviamento e k è un contatto di un contattore speciale che chiude quando la tensione generata dai motori supera di 20 V la tensione di linea e apre quando la corrente recuperata scende al di sotto dei 3 A; nel circuito delle bobine di campo sono incluse anche le bobine dei freni elettromagnetici a pattini. Le posizioni di freno sul controller sono nove: dalla 1 alla 5 freno a recupero, dalla 6 alla 9 ordinario freno reostatico; i pattini elettromagnetici si inseriscono nelle pos. 5 e 9; le rimorchiate sono frenate con il freno solenoidale (ved. nota) nelle pos. da 6 a 9 e sono dotate anch'esse di pattini elettromagnetici agenti in concomitanza con quelli della motrice. Le motrici non hanno altro freno, oltre quello a mano e si conducono nel modo usuale, accelerando con lo spostamento della manovella del controller in senso orario a destra della posizione neutra e frenando spostando la stessa in senso antiorario, sempre a partire dalla posizione neutra; non vi è quindi l'inserzione spontanea del recupero nello spostamento a ritroso della manovella nelle posizioni di marcia, come nel caso dei motori ad eccitazione indipendente o compound.
Nota. - Sulle reti nelle quali i rotabili non erano dotati di freno ad aria le rimorchiate erano di norma equipaggiate con il freno detto a solenoide o solenoidale, un freno su dischi solidali agli assali azionato da elettromagneti alimentati dalla corrente reostatica generata dai motori della motrice in frenatura. Le bobine di azionamento dei freni sulle rimorchiate di un treno erano collegate tra loro in parallelo e alimentate da una derivazione su una resistenza del circuito di frenatura della motrice, in modo che l'interruzione ad es. di una connessione flessibile tra i rotabili non portasse all'inefficienza di tutto l'apparato frenante. Nonostante vari punti deboli, tra i quali l'impossibilità di intervento automatico in caso di spezzamento del treno, il freno solenoidale è stato il tipico freno per le rimorchiate in molte reti dell'Europa centrale negli anni Venti e Trenta, utilizzato in particolar modo sulle reti tedesche fino agli anni Cinquanta.
Eccitazione con regolazione da batteria ausiliaria
E' una soluzione dovuta alla Siemens-Schuckert che permette il recupero in frenatura ricorrendo ad una batteria di accumulatori per la regolazione della corrente nelle bobine di campo dei motori; deriva da un sistema di regolazione di marcia proposto dal Blondel nel 1895 che al momento non ebbe seguito.
Lo schema di fig. 13, a riporta l'usuale circuito di freno reostatico su resistenze, nel quale F è il campo dei motori e W la resistenza di frenatura, normalmente parte del reostato di avviamento e I è la corrente circolante; in fig. 13, b è introdotta nel circuito la batteria di accumulatori B, inizialmente immaginando aggiunta la connessione x di resistenza trascurabile nella quale scorre la corrente I, mentre nella bobina di campo di resistenza r si ha la corrente i=u/r, essendo u la tensione della batteria e la situazione è quindi identica a quella che si avrebbe con un motore ad eccitazione indipendente. Ma se vogliamo avvicinarci al funzionamento del motore ad eccitazione compound, occorre che i si riduca all'aumentare di I, ciò che può ottenersi inserendo nel circuito della batteria la resistenza R, come in fig. 13, c: in tal caso (secondo principio di Kirchhoff applicato alla maglia contenente B) è u-(I+i)R-ir=0, da cui si ricava i=(u-IR)/(R+r). Tra i ed I si ha quindi una relazione lineare per cui la corrente nel campo si riduce all'aumentare della corrente nell'indotto con una legge determinata dal valore di R (fig. 14). Per utilizzare questo circuito per un freno a recupero, sarà sufficiente sostituire la resistenza W con la rete di alimentazione che dovrà ricevere la corrente recuperata (fig. 15).
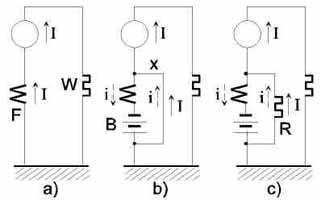
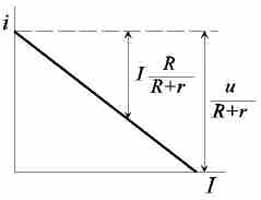
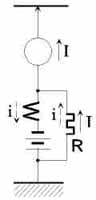
Figg. 13-15
Rete di Budapest. Questo schema è stato applicato sulla rete di Budapest nel 1934, ad un gruppo di motrici tramviarie a due assi e alle motrici della metropolitana del 1896. Per la marcia i due motori sono utilizzati con l'usuale avviamento reostatico e la transizione serie-parallelo, con un controller a quattro posizioni serie e altrettante parallelo. Per la frenatura a recupero si ha un collegamento in serie di indotti, campi e batteria, con una derivazione su una resistenza variabile R (fig. 16). Nel funzionamento dei motori da generatori la corrente di recupero è regolata, secondo i criteri sopra esposti, dalla resistenza R tra tre valori corrispondenti ad altrettante posizioni di recupero, che si raggiungono portando la manovella del controller a sinistra della posizione neutra. In condizioni di riposo il contatto a" del contattore A collega il circuito dei motori alla resistenza R1 attraverso il relè amperometrico B, che eccita quando la corrente raggiunge una soglia predefinita e collega il contattore A, che eccita per una tensione superiore alla tensione di linea e collega il circuito alla linea con l'avvio del recupero; una accidentale interruzione della corrente di recupero da luogo alla caduta di B e quindi di A, staccando il circuito dalla linea. Nell'azionamento del controller per la frenatura, il conducente è tenuto a fermarsi sulla prima tacca e attendere l'accensione della lampada di segnalazione L, conferma del collegamento alla linea, per procedere oltre. Le successive tre posizioni del controller danno luogo alla normale frenatura reostatica.
La batteria di accumulatori è da 75 Ah a 24 V e si ricarica nelle posizioni di marcia in serie. Pare che la percentuale di recupero raggiungesse il 20-22% sulle motrici tramviarie dotate anche di freno Westinghouse e il 36% su quelle della metropolitana dotate del solo freno reostatico oltre quello a recupero, ma questi dati sembrano ottimistici se comparati con quelli delle tramvie di Parigi.
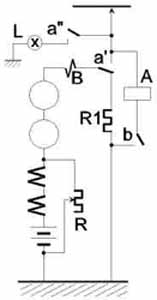
Fig. 16
Principali fonti
| Home Page | presentazione | tecnica della locomozione |
rev. A1 12/09/21