tram e trasporto pubblico a Roma
Note di trazione elettrica
Il primo comando multiplo sistema Sprague (1898)
Il sistema di comando multiplo ideato e realizzato dallo Sprague fu il primo in assoluto impiegato in trazione elettrica; altri precedenti tentativi di utilizzare la doppia trazione con posto di condotta unico utilizzavano o il collegamento diretto tra i motori delle motrici o altri sistemi rivelatisi più o meno fallimentari (come il collegamento meccanico dei controller di due motrici a mezzo di alberi snodati e giunti cardanici). Ma ciò che è più importante è che il sistema Sprague già realizza un avviamento automatico a corrente approssimativamente costante con un relè amperometrico, quello che sarebbe poi diventato di uso corrente, il relè di accelerazione; oltre a ciò il circuito di comando, che si estende lungo tutto il treno, è composto di soli cinque fili, di sezione esigua data la bassa intensità di corrente del circuito di comando.
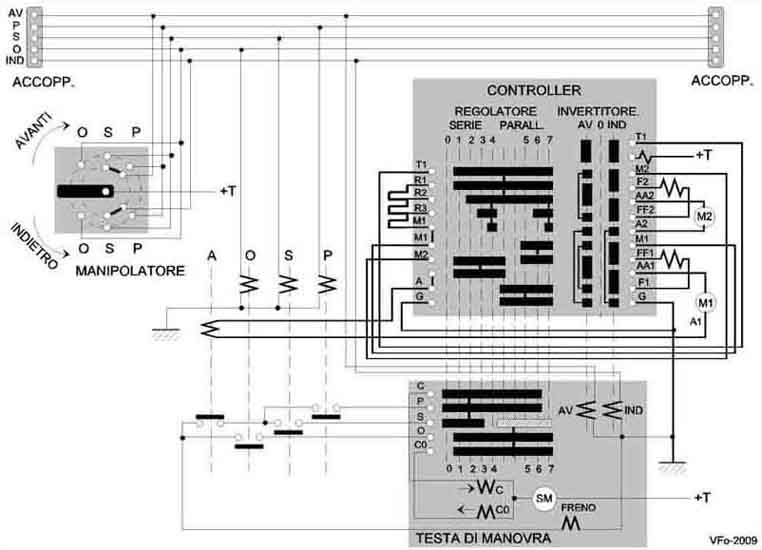
Il sistema Sprague è un sistema a servomotore. L'idea di partenza di Sprague, dopo essersi ispirato con il comando degli ascensori, fu quella di utilizzare un usuale combinatore (controller) tramviario dotato di regolatore e invertitore, dotandolo di quello che oggi si chiamerebbe un attuatore: il regolatore sarebbe stato azionato da un servomotore elettrico nei due sensi di azionamento, mentre l'invertitore sarebbe stato dotato di un comando elettromagnetico agente con un sistema di leve. Sprague utilizzò un combinatore di quelli allora in uso, non molto diverso dai successivi; tutto il meccanismo di comando fu montato in un unico complessivo che, tolte al combinatore manovella e manetta di inversione, fu montato sopra la piastra superiore. La testa di manovra, potremo così chiamare questo complessivo prendendo un nome da un analogo dispositivo usato nei primi locomotori trifasi, comprende i seguenti elementi (ved. schema sottostante):
Il conducente agisce su un piccolo controller di comando, che chiameremo manipolatore utilizzando il termine di allora per non confonderlo con il controller o combinatore comandato dal servomotore, dotato di una posizione neutra centrale e di altre sei posizioni, tre a destra della posizione neutra per la marcia avanti e tre analoghe a sinistra per la marcia indietro; le coppie di tre posizioni sono denominate O, S, P e danno luogo, nell'ordine, al richiamo a 0 del controller, alla marcia in serie, alla marcia in parallelo.
Completano l'equipaggiamento delle motrici il relè amperometrico A, collegato in serie al motore 1, tre relè ausiliari O, S, P e i due accoppiatori per il cavo di comando, a 5 fili, che corre lungo il treno. Il relè A è tarato in modo da eccitare se la corrente nel motore 1 supera un limite prestabilito.
Lo schema seguente aiuterà a meglio comprendere il funzionamento del sistema.
| pos. | manipolatore | nota | azione |
| 1 | Si trova in pos. neutra. | E' la situazione in cui dovrebbe sempre trovarsi la vettura prima dell'avviamento | .Tutti i circuiti sono aperti. Il controller è in pos. neutra (pos. 0), frenato dal freno elettromeccanico diseccitato.. |
| 2a | Passa da pos. neutra a O. | Il controller si trovava già in pos. neutra come in 1. | Eccita il relè O; nessuna ulteriore azione. |
| 2b | Per qualche motivo il controller era in una posizione diversa da 0. | Con l'eccitazione del relè O si chiude il circuito del servomotore attraverso la bobina di campo C0 e i settori O e C0, in serie al freno nella testa di manovra, che libera l'albero del tamburo; il servomotore si avvia e porta alla retrocessione del controller fino alla pos. 0 nella quale, per interruzione dei settori O e C0, si arresta. Ci si riporta alla situaz. 2a. | |
| Per evitare continue ripetizioni nel seguito -------- > | Ogni volta che si avvia il servomotore attraverso i contatti di S o P il circuito si chiude in serie alla bobina del freno, che eccita liberando l'albero del tamburo; all'apertura del circuito, il freno blocca immediatamente l'albero, onde evitare che assuma posizioni irregolari. | ||
| 3a | Passa da O a S, oppure passa ad S direttamente dalla pos. neutra (lato marcia avanti o marcia indietro). | Con l'eccitazione dei uno dei due elettromagneti AV o IND l'invertitore si porta in posizione avanti o indietro, a seconda del senso in cui il manipolatore è stato spostato; si predispone la chiusura del circuito di trazione. Eccita il relè S, mentre cade O. Attraverso il contatto di S e i settori C ed S si chiude il circuito del servomotore attraverso la bobina di campo C; questo circuito è condizionato dalla diseccitazione del relè amperometrico A, che al momento supponiamo caduto. Il servomotore si avvia; il controller lascia la pos. 0 e si avvia sulle posizioni di marcia in serie. | |
| 3b | In una delle posizioni intermedie di serie la corrente nel motore 1 supera la soglia prestabilita. | Eccita il relè amperometrico A che, interrompendo il circuito del servomotore, arresta l'albero del controller; solo quando, con l'aumentata velocità della vettura, la corrente in A scende al di sotto del valore di taratura, la caduta di A richiude il circuito del servomotore; arrivato in pos. 4, il servomotore si arresta per interruzione del settore S e il controller resta nella posizione di fine serie. | |
| 4 | Passa da S a P, oppure passa a P direttamente dalla pos. neutra. | Si ha esattamente lo stesso funzionamento di cui ai punti 3a-b, con la differenza che il circuito è ora chiuso dal relè P e dai settori C e P; a fine parallelo il servomotore si arresta per interruzione del settore P e il controller resta nella posizione di fine parallelo. | |
| 5 | E' riportato da S o da P in pos. O. | Si toglie alimentazione al comando dell'invertitore (elettromagneti AV o IND), che si riporta in pos. neutra aprendo il circuito di trazione. Si ripete il funzionamento di cui al punto 2b; il controller si riporta a 0. | |
| 6 | E' riportato da O in pos. neutra. | Cade il relè O, il circuito si riporta nelle condizioni di cui al punto 1. | |
| 7 | E' riportato da P ad S. | E' la manovra di retrocessione da parallelo a fine serie, non sempre ammessa nei sistemi di trazione. | Il controller si trova in una delle posizioni successive alla 3; il circuito di retrocessione del servomotore si chiude attraverso il settore indicato con tratteggio nello schema e i settori O e C0, arrestando il controller in pos. 4.. |
Agendo sul manipolatore, il conducente comanda la motrice locale attraverso i relè O, S, P e gli elettromagneti AV, IND e, attraverso il cavo di comando, gli analoghi dispositivi di tutte le motrici accoppiate; mentre la corrente di comando per tutto il treno è fornita solo dalla motrice pilota, il circuito di trazione di ogni motrice è del tutto indipendente da quello delle altre e l'avviamento si regola secondo la taratura del proprio relè amperometrico. In linea di principio, ogni motrice può prelevare la corrente di trazione da un proprio trolley o presa da terza rotaia; in quest'ultimo caso è spesso presente un cavo di trazione che corre lungo tutto il treno collegando le varie prese, allo scopo di facilitare il passaggio del treno su sezioni non alimentate come ad es. su scambi e incroci (l'aggiunta del cavo di trazione viene però ad annullare uno dei pregi del comando multiplo Sprague, quello di non avere condutture ad alta intensità tra i diversi rotabili). E' evidentemente possibile anche il comando da una rimorchiata pilota, dotata del solo manipolatore; se non si vuole dotare di presa di corrente questa rimorchiata pilota e non esiste il cavo di trazione, occorre portare alla stessa la tensione di linea, con un conduttore aggiuntivo al cavo di comando a 5 fili.

Treni con comando multiplo: a) tre motrici ad alimentazione
indipendente; b) due motrici e una rimorchiata pilota con cavo di trazione.
Questa l'essenza del funzionamento del sistema Sprague, per il quale si presentano in verità alcuni interrogativi, per i quali non si trova risposta nella documentazione esistente. Ad esempio i seguenti.
Oltre a ciò, un inconveniente subito notato sui treni equipaggiati con il sistema Sprague fu la notevole mancanza di sincronismo tra le varie motrici, dovuta evidentemente all'inerzia dei combinatori tramviari utilizzati e dei relativi servomotori, oltre alla inevitabilmente diversa taratura dei relè amperometrici; a quanto si racconta, l'avviamento del treno avveniva tra strattoni e balzi ed oltre a ciò i passeggeri si lamentavano perchè, almeno all'inizio, il combinatore era montato sotto uno dei sedili longitudinali della corsia passeggeri e non solo era rumoroso, ma pare che qualcuno si spaventasse a vedere la luce delle scintille che appariva tra le connessure del pavimento e sotto i sedili. Nonostante questi e altri inconvenienti, il sistema originario Sprague ebbe un notevole impiego fino ai primi anni del secolo XX, quando fu sostituito dai sistemi a contattori indipendenti, utilizzati fino ai nostri giorni; lo stesso Sprague, con la confluenza della Sprague Electric Railway and Motor Company nella Thomson-Houston (poi General Electric), contribuì largamente al perfezionamento e alla diffusione dei sistemi di comando multiplo, che per parecchi anni furono commercializzati sotto i nomi di Sprague-Thomson Houston o Sprague-General Electric (applicati ad es. risp. sulle motrici a imperiale dei tram dei Castelli del 1903 e sulle motrici due e quattro motori della ferrovia Roma-Fiuggi-Frosinone nel 1915).
Qualche applicazione del sistema originario Sprague
| rete | tipo treni | anno |
| South Side Elevated Railroad (Chicago) | motrici e rimorchi intermedi | 1882 |
| Metropolitana di Parigi | motrici e rimorchi intermedi (3 motr. a 2 assi, 20 motr. a 4 assi) |
1904, 1906 |
| Rete P.O. (Francia) | motrici e rimorchi pilota | 1900 |
Comando multiplo elettromagnetico Sprague-Thomson Houston
| Home Page | presentazione | tecnica della locomozione |
rev. A1 12/09/21
{kind=link}